LINISHING | EXPLORING COLLABORATIVE ROBOTICS
Contemporary industrial production is no longer simply about reducing ergonomic and safety risks, or
improving speed and productivity, more-and-more it is driven by decreasing lead-times and increasing levels
of customisation. This approach requires flexible and adaptive production units, including a combination of
human and robot capabilities. Here, we explore the role collaborative robots play in the linishing
process.
Assistive Robots and machines that work alongside skilled human experts are key enabling technologies in
advanced manufacturing and the factories of the future. Safety is a primary concern, but further work is
needed to extend the application of robotic technologies across manufacturing environments. Rather than
autonomous, robotic systems designed to replace human workers, new systems will work in areas requiring a
high level of integration between human and robotic competencies.
Collaborative robots are robots designed to allow humans and robots to work together without the need for
physical cells to separate and protect humans from the robot. These force-limited robots have built-in
sensors that monitor and detect the presence of objects such as people by detecting impact and external
forces. These robots stop moving when they impact with something else. They are also designed to have
rounded edges and smoother finishes so that their impact creates minimal damage or harm to others.
Human and robot linishing collaboration
The linishing video of a UAP worker collaborating with a UR10 demonstrates the capability of a human and robot working together to achieve a time consuming and large scale task that would be difficult for a human to complete on their own.
Existing industrial robot installations are subject to strict international standards governing the design,
installation, and integration of robots and robot systems (ISO 10218 1&2 – 2011).
There are four primary HRI safety methods. Methods often separate the robot and operator with physical or
sensor-based barriers. Given these barriers are somewhat eliminated in collaborative workspaces the ISO
standards have been updated to specifically address the integration of collaborative systems (ISO/TS
15066:2016). Collaborative robots employed to work in industrial operations must fulfil at least one of four
modes. Different modes align with different applications of human/robot collaboration.
Digital Transformation
Advanced digital technologies have already transformed banking, communications, and media landscapes.
Representing one-sixth of the global economy the manufacturing sector poses just as much potential for
disruption.
Lower costs and improved robot capability are decreasing barriers to entry and increasing global
competitiveness. From agriculture to transportation, SMEs are exploring robotic applications in areas not
previously considered possible. Accordingly, 52% of Australian CEOs are exploring the possible benefits of
humans and robots working together.
Core Considerations
- End Effectors are the tools that can be attached to a robotic arm such
as a gripper, a milling head, a spindle etc. - Payload is the weight that a robotic arm can carry. The payload needs to
consider the weight of the end effector and anything it would carry or
force it would apply. - Reach is the extension length of the robotic arm from its wrist to its base.
- Maximum Speed is the fastest speed that the end effector can move.
- Degrees of Freedom refers to the number of axes that the robotic arm can
move around. The more degrees of freedom a robotic arm has means it has
increased levels of dexterity. - Repeatability is the ability for the robotic arm to accurately repeat
the same motion. - Price, Weight and Size are other factors that need to be considered when
taking into account the different collaborative robots on the market.
Collaborative Robots that are force limited achieve their safe human/robot relationships through four different approaches. These different approaches classify the collaborative robots under 4 different types including:
- Inherently Safe robots have many sensors and a low amount of force (a
payload under 1kg) so even if they collided with a person they would not
cause harm. - Skin Sensing robots use tactile sensing technology to sense impact
causing them to stop automatically at specific levels. - Force Sensor Base robots have a force-sensor at their base which
measures and detects different forces placed onto the robot. - Joint Sensing robots use their joints to detect and monitor forces that
are applied to the robot’s body. This is the most common type of
collaborative robot on the market and the one that the design robotics team
at QUT uses for their research.
For more details and examples of different kinds of collaborative robotic arms made from a range of manufacturers refer to the comprehensive Robotiq Collaborative Robot eBook https://blog.robotiq.com/collaborative-robot-ebook.
Manufacturing Advantages
- Improved cost-effectiveness in complex, creative tasks supporting approaches that let humans and robots collaborate effectively
- Increased efficiency supporting co-located human/robot collaboration is expected to lead to significant time and cost savings
- More flexibility Human/robot collaboration approaches allow for on-the-fly (or in-process) and direct designer input facilitating the creation of unique bespoke products for clients
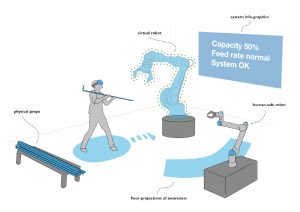
- Improved safety: Augmented Reality combined with human/robot collaboration enables increased scope for co-location of humans and robots supported by advanced safety mechanisms.
Manufacturing Limitations
Currently, the majority of collaborative robotic arms on the market have payloads under 16kgs which helps
them be safer and easier to use in a range of applications. However, in many manufacturing tasks, there is a
need for high levels of force to be applied by robotic arms to effectively achieve tasks such as metal
polishing or grinding. Therefore one of the biggest limitations that collaborative robots face within
manufacturing environments is their low levels of force that they can apply to work in industrial settings.
Another limitation is their size with reach ranges typically under a meter, thus making it difficult for
these types of robots to work on large or complex forms.
There are many ways that this can be overcome and will require each user to consider the pros and cons of
the robotic technology available to them. As with many manufacturing processes, there is a workflow to
consider which involves different skill sets, tools, and applications. Therefore some manufacturing settings
may find they require a combination of traditional tools with industrial robots to conduct large high-force
tasks which are then finished off by humans and collaborative robots to do the finer parts of the process.
As with any process, the combination of tools and approaches will depend on several factors.\
The Future of Manufacturing
With support from the Innovative Manufacturing Cooperative Research Centre (IMCRC), Design Robotics is collaborating to present a range of new
fabrication and vision systems solutions. The goal is simple – to design for human intelligence and optimize
the relationship between people and machines.
Pushing the limits of industrial robotics is a move to empower people. Navigating the increasing complexity
of manufacturing inevitably supports human experience and enhances skills acquisition. At its heart, this
approach celebrates the best of what robots and machines can achieve – problem-solving, and the best of what
humans can do – social intelligence and contextual understanding.