ROBOT FABRICATION | USING RHINO & GRASSHOPPER
There are considerable advantages in using products like Rhinoceros
and Grasshopper, Robots for Grasshopper, and KUKA|PRC. Software and plugins enhance the
control of industrial arm robots like the Universal Robotics UR10 or the KUKA range of robots,
allowing users to create 3D simulations the robot moves or performs a complete task.
Rhinoceros (also called Rhino 3D, or Rhino) is a Computer-Aided Design (CAD) software used
for the design and modelling of 3D products. It is widely used in the industrial / product design
professions, and also used in a variety of industries because of a large range of plug-in applications that
enhance the options of the basic Rhino software. A major advantage of using Rhino over similar software
packages is a plug-in application called Grasshopper. Grasshopper allows users to use a visual programming
language that makes coding accessible to people with limited programming knowledge. By using Grasshopper,
users can make rapid changes or explore many variations of 3D models using algorithms or simple commands.
Grasshopper’s interface simplifies the creation of complex models, and with the right plug-ins – allows for
other abilities such as robot control that can potentially fabricate.
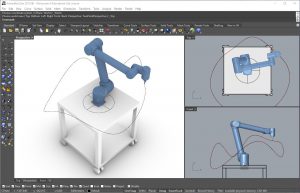
Rhinoceros 3D software: Quick modelling, and straightforward control of robots. In this example a simulation of a UR10 robot is tracing a loop drawn in Rhino by the user.
Why Grasshopper?
Rhino and the Grasshopper plug-in have many advantages over other methods of robotic control systems. Rhino
is primarily a 3D modelling application, so creating or editing the 3D simulation environment is controlled
within one type of software. Once a model is created, it is easy to make adjustments to the location for
setting up a robot in a real-world environment, as well as objects for the robot to interact with or avoid.
The advantages of using Grasshopper include rapid workflows from virtual prototypes to production. Changes
to the control of the program or the intended design can be made quickly and new fabrications can be
created.
The example workflow (illustrated below) of this is the ROBOBLOX project by QUT Design Robotics and UQ
Architectural Robotics. The project created over 100 unique polystyrene foam blocks cut by a hot-wire cutter
attached to a KUKA industrial robot, for installation as an art piece.
RoboBlox Workflow
- Creation of the 3D models for each unique design of the blocks in Rhino.
- Grasshopper was used to create the path the robot would follow to cut each of the blocks, and this pathway is simulated to predict any errors.
- Grasshopper was used again to send the commands to the robot for the real blocks to be cut from a large slab of polystyrene.
- The unique polystyrene blocks were finished and installed on site.
The entire process from choosing a design, to installation, was fabricated quicker and with greater
accuracy compared with a similar project completed without a robot.

Workflow from modelling to simulation to fabrication to installed product
Visual Coding
On a typical Windows PC, the Grasshopper interface, or canvas is clearly laid out (shown above). Menus at
the top of the Grasshopper window allow users to switch between different panels of icons. Each icon
provides an option or toolset – with additional downloadable plugins extending these panels of tools. A
script in Grasshopper uses components that look like box-like containers, each one offering varying inputs,
an altering function, and outputs. The example image shows a script made with components from the Robots
plugin. This layout shows how the visual script is easily read by following the guidewires that connect the
container’s transfer data. Changes made to the data at the beginning of the script alters later outcomes and
using this method it is quick to visualise many alternative designs before sending the final design to the
robot for fabricating. The advantage of this is that rapid prototyping and robotic fabrication can be
achieved or experimented with a variety of adaptations through the use of one type of software.
The Future of Manufacturing
With support from the Innovative Manufacturing Cooperative Research Centre (IMCRC), Design Robotics is collaborating to present a range of new
fabrication and vision systems solutions. The goal is simple – to design for human intelligence and optimize
the relationship between people and machines.
Pushing the limits of industrial robotics is a move to empower people. Navigating the increasing complexity
of manufacturing inevitably supports human experience and enhances skills acquisition. At its heart, this
approach celebrates the best of what robots and machines can achieve – problem-solving, and the best of what
humans can do – social intelligence and contextual understanding.
Resources
- Rhino
- Grasshopper
- Robots for Grasshopper
-
[KUKA PRC](https://www.robotsinarchitecture.org/kuka-prc) for Grasshopper